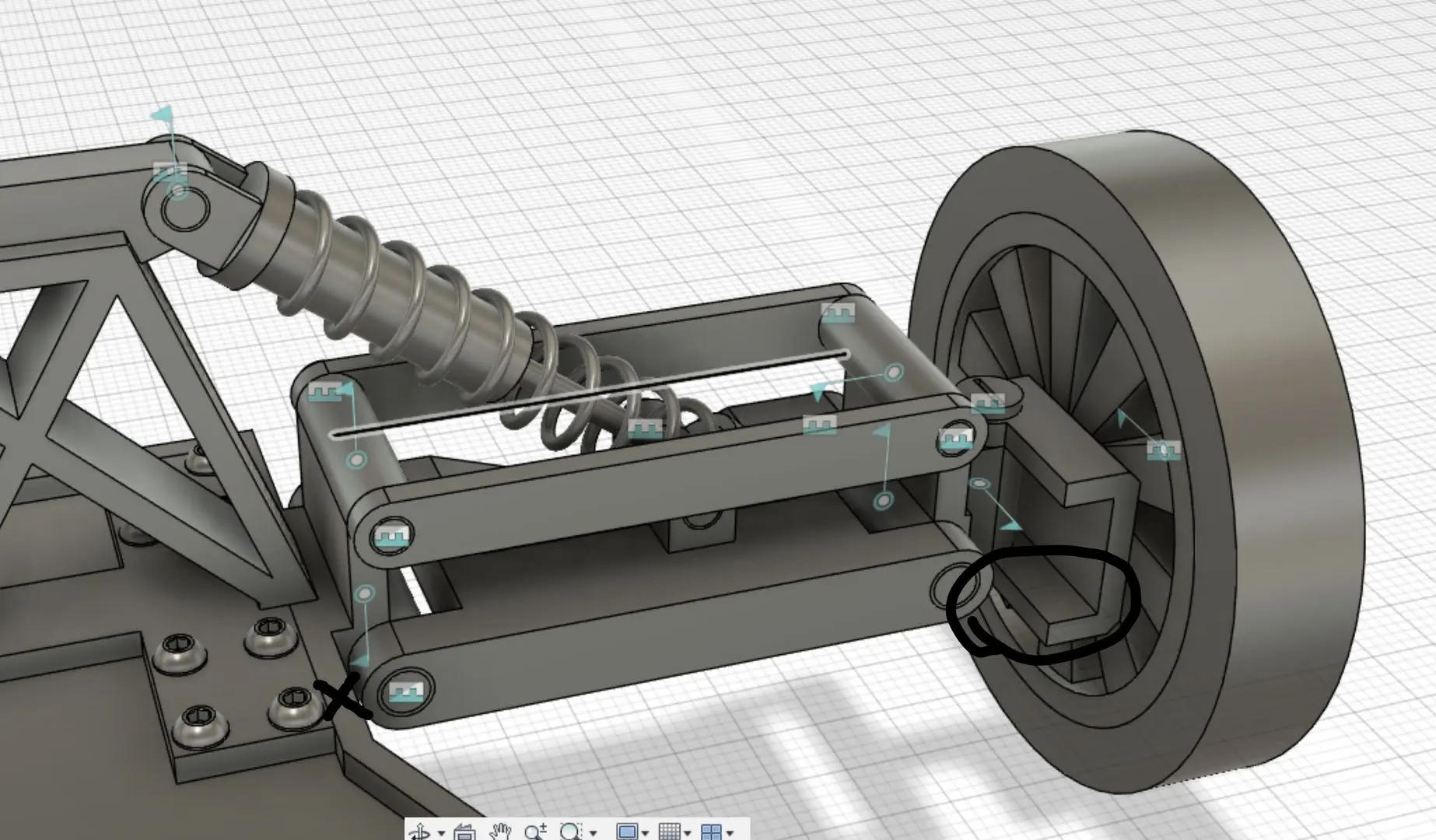
I cannot figure out how to implement a servo push for my steering system (from around point x to around the circle) that remains perfectly geometric despite suspension length change (ball joints ok). Idk if this is the place for this, but if anyone has an idea, please let me know.